di Enrico Mitrano
Nell'ambito modellistico assume un ruolo importante la teoria con le sue precise
leggi fisiche, meccaniche ed aerodinamiche.
Non certo presentandovi un trattato ricco di formule, equazioni e logaritmi potrete
ingoiarlo con appetito, ma una spolveratina di notizie teoriche circa l'Elicottero
R.C. ed il suo modo di volare, stuzzicherà maggiormente l'interesse per questa
categoria.
Preciso di aver detto Elicottero R.C. per comodità d'intesa, ciò però non vuoi
diversificare i principi aerodinamici che sono gli stessi applicati per il volo dei
veri elicotteri (questo vale anche per gli aeromodelli sottoposti alle stesse leggi
fisiche degli aeroplani).
Anzi, se prendiamo ad esempio vari piloti di Elicotteri R.C. che addirittura fanno
volare i loro modelli in traslazione e punto fisso rovesci (cosa da far venire la
pelle d'oca) possiamo affermare che il progresso meccanico nel modellismo ha
superato quello acquisito nella realtà (rimane comunque prova memorabile la
sperimentazione della LOCKEED col suo XH-51 A del 1960 con cui questa famosa casa
costruttrice aereonautica ottenne brillanti esecuzioni acrobatiche - looping,
tonneau etc.) (Aviazione Oggi Fabbri Ed. pag. 162, 1975).
Dopo questa premessa entriamo nel vivo dell'argomento di questo articolo esaminando
sinteticamente i punti focali della teoria elicotteristica.

seguono la direzione impartita dalla barra.") Nell'elicottero la sostentazione è determinata dalle pale che ruotando attorno ad
un asse(albero rotore) esplicano la funzione che nell'aeromodello è affidata all'
ala fissa. L'elicottero si può definire quindi ala rotante.
Nell'elicottero la sostentazione è determinata dalle pale che ruotando attorno ad
un asse(albero rotore) esplicano la funzione che nell'aeromodello è affidata all'
ala fissa. L'elicottero si può definire quindi ala rotante.
Le pale sono due, o più, e girano su un asse verticale come una grande elica, il
cui piano di rotazione (piano immaginario descritto dalla estremità delle pale)
risulta perciò orizzontale nel volo stazionario. Il disco descritto dalle pale si
definisce disco attuatore.
 La pala è sagomata a forma di ala, stretta e lunga con un profilo solitamente
biconvesso simmetrico per limitare gli spostamenti del centro di pressione
entro stretti limiti al variare dell'incidenza. Ad essa si applicano le medesime
leggi aerodinamiche che vigono per l'ala riferite sempre alla posizione assunta dal
profilo rispetto al vento relativo determinato dal movimento della pala.
La pala è sagomata a forma di ala, stretta e lunga con un profilo solitamente
biconvesso simmetrico per limitare gli spostamenti del centro di pressione
entro stretti limiti al variare dell'incidenza. Ad essa si applicano le medesime
leggi aerodinamiche che vigono per l'ala riferite sempre alla posizione assunta dal
profilo rispetto al vento relativo determinato dal movimento della pala.
Tale movimento risulta normalmente formato da un movimento di rotazione ed uno di
traslazione di tutto il rotore quando l'elicottero si muove nell'aria. (La velocità
del vento relativo è diversa in ciascuna sezione della pala).
 provvedono direttamente sia alla sostituzione che alla
traslazione. A differenza dei rotori delle figure precedenti, pur fornendo
risultati di risposta più rapidi (acrobatici) sollecitano a maggiori sforzi la
struttura e i servocomandi, anche se ben ammortizzati.") Nell'elicottero la rotazione delle pale, e quindi il sostentamento, sussiste
separatamente dalla traslazione ed è per questo che otteniamo il volo a punto
fisso, come pure la direzione in un qualsiasi punto dello spazio.
Nell'elicottero la rotazione delle pale, e quindi il sostentamento, sussiste
separatamente dalla traslazione ed è per questo che otteniamo il volo a punto
fisso, come pure la direzione in un qualsiasi punto dello spazio.
La pala, a differenza dell'ala può in volo variare l'angolo di calettamento (angolo
che la corda del profilo della pala forma con l'asse longitudinale dell'elicottero)
e si definisce angolo di passo.
Fondamentale importanza assume l'angolo d'incidenza che la pala (la sua
corda) forma con la direzione del vento relativo. Ovviamente ad ogni variazione di
incidenza è variato anche l'angolo di passo relativo. Ovviamente ad ogni variazione
di incidenza è variato anche l'angolo di passo, il che comporta aumento o
diminuzioni della portanza e della resistenza della pala medesima.
Nel volo stazionario (hoovering) la forza totale di portanza risultante è uguale
alla forza peso e passa per il centro di gravità (C.G.) del modello.
Agendo quindi sullo stick che comanda il movimento del passo collettivo si
ottengono movimenti di salita e discesa, regolando così la quota di volo.
E importante notare che un aumento del passo corrisponde, oltre che un aumento di
portanza, anche un aumento della resistenza della pala: la pala dunque resta più
frenata e per conservare la velocità di rotazione occorre aumentare gas-motore.
L'esistenza di un rotore mosso da un motore, e la conseguente coppia generata, che
tenderebbe a far ruotare su se stessa tutta la fusoliera richiede l'introduzione
dell'elichetta anticoppia (nell'elicottero birotore tale affetto non
sussiste essendo i due rotori controrotanti annullandosi automaticamente la
coppia). Quando varia la coppia del motore, in seguito alle variazioni del passo
collettivo, deve necessariamente venire variato il valore dell'anticoppia, variando
il passo della suddetta elichetta di coda.
Nel modello in hoovering la forza aerodinamica risulta verticale e centrata.
Infatti la velocità del vento relativo nei vari punti della pala è proporzionale
alla distanza del centro del rotore. L'angolo d'incidenza delle pale resta costante
nel giro, e la portanza risulta quindi distribuita in tutta la superficie del disco
rotore, cosicché, rispetto ad un diametro qualsiasi, la portanza di un semidisco è
uguale a quella dell'altro semidisco.
Per effettuare il volo in traslazione si inclina il piano del rotore nella direzione voluta in modo che la forza aerodinamica totale risulta anch'essa inclinata nella direzione scelta ottenendo una componente orizzontale che costituisce la trazione.
Quando il modello è animato da una velocità di traslazione V, nella estremità della
pala A la velocità risulta essere la somma di quella lineare di rotazione U più la
V diretta nello stesso senso; nell'estremità C la velocità risulta invece essere la
differenza tra la V e la U diretta in senso opposto alla V.
Quindi nel semidisco DAB (pala avanzante) la velocità aerodinamica è maggiore di
quella del semidisco BCD (pala retrocedente).
La variazione ciclica del passo si ottiene facendo ruotare le due pale del rotore,
costituenti un tutto unico, attorno ad un asse longitudinale disposto secondo la
dimensione maggiore delle pale; in tal modo, mentre l'incidenza di una pala
aumenta, l'incidenza della pala opposta diminuisce di un angolo uguale.
Analogamente, rispetto ad un piano (pressappoco orizzontale) passante per il mozzo
del rotore e normale all'albero, quando una pala sale l'altra scende. La variazione
ciclica del passo avviene automaticamente mediante un congegno chiamato piatto
oscillante. Questo è comandato tramite asticine con snodi sferici da due servocomandi per cui può inclinarsi in qualsiasi direzione e con una determinata gradazione che risulta essere quella che imprimerà la forza di trazione. Dal piatto ciclico, che in pratica è formato da due dischi sovrapposti vincolati da un cuscinetto (per cui girano indipendentemente uno dall'altro ma sempre in posizione
parallela), più precisamente dal disco superiore si snodano due leve (leve
miscelatrici) che si collegano alla barra stabilizzatrice, montata sulla testa del
rotore e che, con due alette alle estremità (contrappesi), funge da servo per
aiutare le pale e quindi il gruppo testa rotore ad inclinarsi nella posizione di
avanzamento voluta (nel caso di pale dotate di appesantimento (pale piombate)
questo meccanismo non necessita per cui il piatto ciclico è direttamente collegato,
sempre tramite leve miscelatrici, ai mozzi portapale del rotore).
Per quanto prima enunciato, considerando il modello di elicottero in volo
orizzontale rettilineo succede che, mentre una pala è sollecitata a salire l'altra
pala, nel settore opposto di minor portanza, è sollecitata a scendere e così
alternativamente: ne derivano continue periodiche oscillazioni delle pale (nel
senso alto-basso) rispetto al piano normale al rotore passante per il centro di
rotazione, che costituiscono il cosiddetto flappeggio.
Il flappeggio è automaticamente ridotto dalla forza centrifuga che tendendo ad
irrigidire le pale le stabilizza nel piano di rotazione.
Da quanto fin qui esposto possiamo facilmente capire come si determina la
traslazione inclinando il piatto oscillante, ad esempio in avanti: aumenta così
(rispetto al passo medio) il passo della pala durante il semigiro retrocedente BCD,
mentre diminuisce durante il semigiro avanzante DAB.
In realtà, considerato applicato nel punto C l'aumento massimo del passo, per
l'inerzia di moto della pala il massimo innalzamento della stessa si ha con circa
90° di ritardo, cioè nel punto D (Fig. 4). Analogamente il massimo abbassamento
della pala si avrà nel punto B.
Da quanto pocanzi descritto ne succede che il piano del rotore e quindi le pale si
inclinano verso l'avanti, come se rotasse intorno all'asse AC il punto B
abbassandosi.
In tale posizione la forza aerodinamica totale risulta inclinata anch'essa verso
l'avanti e può decomporsi in una componente verticale equilibrante il peso e in una componente orizzontale diretta in avanti: questa costituisce la trazione
che determina la traslazione. Maggiore è l'inclinazione e di conseguenza il valore
della componente orizzontale e quindi la velocità di traslazione.
Osservando brevemente la funzione del passo collettivo, ossia l'aumento
dell'incidenza delle pale simultanea, osserviamo che questa si ottiene con lo
spostamento in alto o in basso di tutto il piatto ciclico per cui, tramite due
barrette a snodi sferici vengono mossi i mozzi portapale intorno al loro asse di
rotazione, oppure, pur rimanendo fisso il piatto oscillante, otteniamo la stessa
variazione di passo collettivo tramite un'asta passante dentro o a lato dell'albero
rotore che ugualmente va a muovere i mozzi portapale e di conseguenza l'aumento o
diminuzione di incidenza di passo (normalmente varia da + 6° a - 2°).
La variazione collettiva si sovrappone alla variazione ciclica agendo durante un
giro completo del rotore.
 In questa rapida panoramica di notizie teoriche abbiamo valutato come il rotore
dell'elicottero provveda sia alla sostentazione, sotto l'aspetto aerodinamico nel
volo stazionario, la funzione del rotore consiste nell'aspirare dall'alto una massa
d'aria e nel spingerla attraverso lo stesso disco-rotore in basso, imprimendo ad
essa una accelerazione (velocità indotta).
Per effetto ditale azione si verificherà nella parte sovrastante il disco una
depressione, mentre al disotto del disco la pressione sarà superiore. Nel caso
quindi di vicinanza al suolo, per il suddetto principio, il modello sarà
maggiormente sostenuto da questa forza che viene definita effetto suolo.
In questa rapida panoramica di notizie teoriche abbiamo valutato come il rotore
dell'elicottero provveda sia alla sostentazione, sotto l'aspetto aerodinamico nel
volo stazionario, la funzione del rotore consiste nell'aspirare dall'alto una massa
d'aria e nel spingerla attraverso lo stesso disco-rotore in basso, imprimendo ad
essa una accelerazione (velocità indotta).
Per effetto ditale azione si verificherà nella parte sovrastante il disco una
depressione, mentre al disotto del disco la pressione sarà superiore. Nel caso
quindi di vicinanza al suolo, per il suddetto principio, il modello sarà
maggiormente sostenuto da questa forza che viene definita effetto suolo.
Per regolarci dinamicamente quando il modello entra in questo stato calcoliamo a
vista un'altezza da terra di circa 8/10 del diametro del rotore stesso: è bene
chiarire che sotto effetto suolo, pur necessitando al decollo meno potenza
motrice il modello sarà mal controllabile e tenderà a sfuggire in direzioni non
volute e con movimenti abbastanza nervosi: è bene quindi di cercare di superare
subito tale altezza critica ed ivi esercitarsi al volo.
Per concludere diamo un'occhiata teorica all'autorotazione, che, seppur riservata
ai più esperti, dovrebbe essere la meta più ambita da tutti, oltretutto perché è
l'unico modo per salvare da gravi scassature l'elicottero in caso di piantata del
motore in volo. Affinché si abbia autorotazione la forza aerodonamica totale F deve
risultare inclinata in avanti (rispetto al senso di rotazione e all'asse
longitudinale della pala) in modo che la sua componente orizzontale Ft sia diretta
anche essa in avanti e funzioni da forza di trazione della pala stessa.
Considerando che il modello debba scendere in autorotazione si verificano due
condizioni aerodinamiche:
- Prima condizione (Fig. 9)
- supponendo un'autorotazione verticale in relazione alla distanza del centro
delle diverse sezioni delle pale si distinguono 3 zone distinte in figura da
'p' zona passiva, 'u' zona utile, 'a' zona
antirotativa.
L'autorotazione si stabilizza quindi quando le forze rotative si equilibrano a quelle antirotative. - Seconda condizione (Fig. 10)
- supponendo l'autorotazione in traslazione (di fatto quella da eseguire!) tali zone, con la presenza di un'area di flusso invertito (tratteggio parallelo) creata dal bordo di uscita, investito dal vento relativo, e quindi ad azione portante negativa anziché concentriche si presentano eccentriche, essendo spostate verso sinistra rispetto al senso di traslazione. A questo proposito possiamo dire che la traslazione favorisce l'autorotazione proprio per la sua graduale azione di frenata della discesa che viene ulteriormente sviluppata a pochi metri da terra eseguendo una piccola cabrata e quindi con l'inversione rapida del passo.
Se prendiamo in considerazione il 1° punto, che considera l' autorotazione in verticale notiamo che il passaggio del flusso invertito non è graduale, come quando avviene in traslazione, ma repentino per cui viene a formarsi un anello vorticoso nell'area di rotazione delle pale per cui il modello risulta difficile da manovrare. Trovandoci in questa condizione l'unico rimedio è il porsi in traslazione al fine di ottenere un valore di velocità di discesa minimo, aumentando così la potenza necessaria a sostenere il volo (analogamente avviene in pratica quando, con la velocità di traslazione aumentata si richiede meno potenza al motore). E chiaro che il rotore girando liberamente, non più mosso dal motore, e quindi non esistendo più la famosa coppia non necessita del ruotino anticoppia e così l'apposito meccanismo provvede a staccarsi e a rendere il rotore a ruota libera.
Con quanto detto in questi appunti, ho cercato di presentarvi ciò che, seppur potrebbe risultare pesante ed infruttuoso, per l'apprendimento pratico del volo degli Elicotteri R.C., è invece di fondamentale importanza e che deve correre parallelamente all'esercitazione pratica.
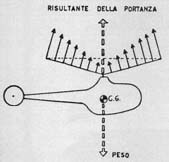
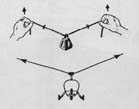
| Fig. 1 - Nel volo a punto fisso la portanza del rotore in rotazione equilibra il peso dell'elicottero. |
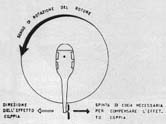
| Fig. 2 - Il ruotino di coda compensa l'effetto coppia generato dal rotore mosso dal motore. |
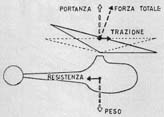
| Fig. 3 - Quando incliniamo il rotore (es. in avanti) la forza aerodinamico totale si inclina sicchè la sua componente orizzontale viene a costituire la trazione. |
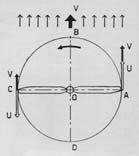
| Fig. 4 - Rotore dell'elicottero indicante schematicamente le velocità che si creano in traslazione. |
| Fig. 5 - Effetto della forza centrifuga che tende ad irrigidire le pale. |
| Fig. 6 - Durante la variazione ciclica il massino innalzamento della pala si avrà nel punto D. con circa 90° di ritardo rispetto al punto C dove è stato applicato il massimo aumento di passo. |
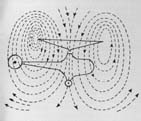
| Fig. 7 - Circolazione dell'aria generata dal rotore. È evidente come rispetto al terreno (linea nera) si crei un cuscino d'aria (effetto suolo). |

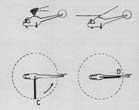
| Fig. 8 - Forze presenti sulla pala al momento dell'autorotazione (vista di profilo). La componente Ft della forza totale F consente la rotazione. |
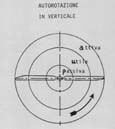
| Fig. 9 - AUTOROTAZIONE IN VERTICALE: Forze presenti sulla pala al momento dell'autorotazione (vista di profilo). La componente Ft della forza totale F consente la rotazione. |

| Fig. 10- AUTOROTAZIONE IN TRASLAZIONE: Zone del rotore in autorotazione. |
Non ho voluto addentrarmi troppo in formule ed ulteriori arzigogolamenti teorici, appresi da manuali per il pilotaggio di elicotteri reali, che seppur rispettando la stessa aerodinamica, ci avrebbero forse complicato le idee. Non di meno, quando descritto, passibile di vostre eventuali critiche, correzioni e domande spero vi sia di sostegno e magari quale scopo di dialogo fra tutti noi Elicotteromodellisti.
![]()